# Lecture 13 - Steering Behaviors ### SET09121 - Games Engineering <br /><br /> Kevin Chalmers and Sam Serrels School of Computing. Edinburgh Napier University --- # Recommended Reading - Artificial Intelligence for Games. Second Edition. Millington and Funge (2009). - Whole chapter on steering behaviours. 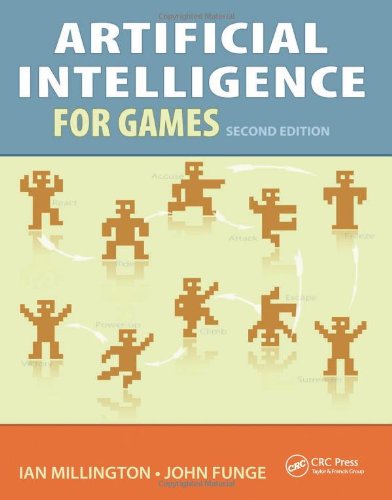<!-- .element width="30%" --> --- ## Review -- Background Knowledge --- # Review -- AI Techniques - There are numerous usable AI techniques applicable to games development. - Classical, deterministic techniques -- popular. - Academic, non-deterministic techniques -- useful in some areas. - Different techniques accomplish different aspects of game behaviour. - Movement. - Decision making. - Strategy. - Learning. - Today we will look at the basics of movement via steering behaviours. --- # Review -- Working with Vectors - We have dealt with vectors for a long time now. - Hopefully you understand them! - Steering behaviours rely on vector operations. - We are generally trying to work out positions and velocity to move entities in a certain manner. - We will be performing numerous vector operations to support our steering behaviours. - Adding and subtracting vectors. - Getting the length of a vector. - Normalizing a vector. - Converting vectors to angles. --- # Review -- Basic Physics/Movement - Steering behaviours work with our physics engine. - Steering behaviours output a direction of travel. - And a rotation if you want to use it. - We use this output to influence our entities. - We can set the velocity directly. - We can apply the output as a force. - Remember: - Out physics engine is concerned with object movement. - Our steering behaviours are also concerned with object movement. - Therefore, combining the two is a good idea. --- ## Steering Behaviours --- # What are Steering Behaviours? - Steering behaviours are an AI technique that lets us program basic movement. - Movement is often considered the base ability of a game AI. - Steering behaviours are actually very simple. - They work on basic object positioning and rotation. - They provide an output which tells a game character which way to move. - This can be considered the velocity of an entity. - There are numerous examples (see the recommended reading): - Seek - Flee - Arrive - Avoid obstacle - etc. --- # Example -- Flocking --- # Example -- Flocking <iframe width="1400" height="800" src="https://www.youtube.com/embed/QbUPfMXXQIY" frameborder="0" allow="accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture" allowfullscreen=""></iframe> --- # Example -- Game <iframe width="1400" height="800" src="https://www.youtube.com/embed/J2hI_eGGmzg" frameborder="0" allow="accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture" allowfullscreen=""></iframe> --- # Steering Behaviours - There are many steering behaviours out there. - Refer to the AI book for some of the most useful. - You can even define your own if you like. - We will only look at four: - **Seek** : move towards a target. - **Flee** : run away from a target. - **Arrive** : move towards a target and stop within a certain range. - **Face** : face the target. --- # Seek - Very simple idea. - Move towards a target. - Calculation: $$ d = target - position $$ $$v = \hat{d} \times speed$$ 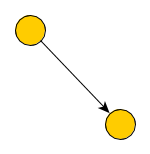 --- # Flee - Also simple -- effectively the inverse of seek. - Run away from a target. - Calculation: $$d = position - target$$ $$v = \hat{d} \times speed$$ 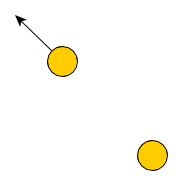 --- # Arrive - Seek, but with a stopping distance to stop the wiggle. - Move towards target and stop when within a given distance. - Calculation: $$d = target - position $$ $$ ||d|| \leq radius \implies v = 0 $$ $$ ||d|| > radius \implies v = \hat{d} \times speed $$ 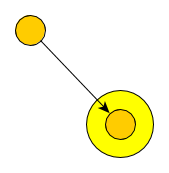 --- # Face - A rotational steer. - Turn to face a target. - Calculation (simplified -- there are more checks to do): $$d = target - position $$ $$\theta = \arctan(y, x) $$ $$r = (\theta - orientation) * rot\_speed$$ 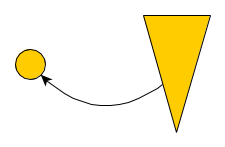 --- # Steering Behaviours in Our Engine - We want to build a reusable technique for steering behaviours. - We want reusable so we can program as many steering behaviours as we like. - We will not be creating or using any particular pattern or data structure approach this time. - A steering behaviour is just a steering behaviour. - If you like you can go further and combine steering behaviours within a single steering behaviour. - See weighted/combined behaviours in the recommended reading. Steering Behaviour Interface --- # Steering Behaviour Interface - `steering_behaviour` is our base interface (or virtual class in C++ terms). - It only declares one pure virtual method: - `get_steering` - `get_steering` performs the necessary calculation for the defined steering behaviour and outputs a `steering_output`. 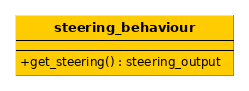 --- # Steering Output struct - `steering_output` declares two values. - `direction`: : the vector we want to travel in. - `rotation`: : the angle we want to turn. - Results from `get_steering` are put in here. - We will not use rotation in the practical, but it is there if you need it. 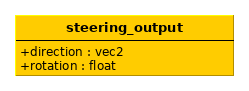 --- # Example -- Seek - We have two entities: - `target` and `character`. - We have `max_speed`. - `get_steering` is: ```cpp steering_output output; output.direction = target.get_position() - character.get_position(); output.direction = normalize(output.direction); output.direction *= max_speed; output.rotation = 0.0f; return output; ``` 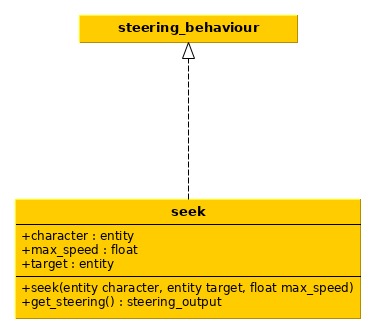 --- # Example -- Flee - We have two entities: - `target` and `character`. - We have `max_speed`. - `get_steering` is: ```cpp steering_output output; output.direction = character.get_position() - target.get_position(); output.direction = normalize(output.direction); output.direction *= max_speed; output.rotation = 0.0f; return output; ``` 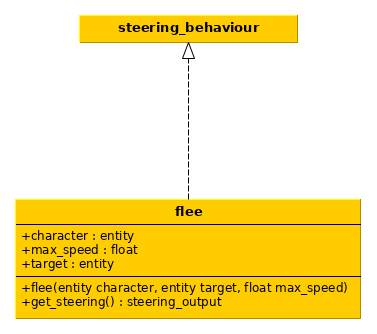 --- # Combining Steering, Decisions, and State - Next we are going to discuss decision making and behaviour control using state machines and decision trees. - We will be looking at combining these ideas to create a sophisticated looking AI. - We will look at this in more detail next week. - The idea we will look at is when we make a decision (via a decision tree) we will change state. - For example, if we decide we are under attack we change our state to engage. - We can consider that the behavioural states also contain a steering behaviour if necessary. - For example having a seek state. --- # Example -- The Sophisticated Guard - The guard has some basic actions: - The guard patrols between point A and point B. - The guard has a 20% chance of stopping while patrolling. - If the guard is shot at, the guard will stop patrolling, engage the player, and fire back. - If the guard sees the player, the guard will engage the player. - If engaged and the player is far away, the guard will seek the player. - If health is low, the guard will flee from the player. - If the guard loses sight of the player, the guard will return to patrolling between point A and point B. --- # Example -- The Sophisticated Guard Diagram 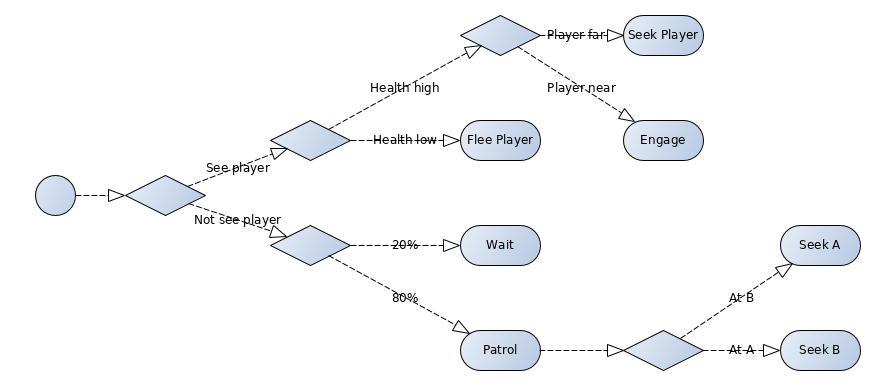 --- # Combining Steering Behaviours - We can also combine steering behaviours to create more elaborate movement. - This is how flocking works. - Remember that we can add vectors together quite happily. - This will give us a mean direction of travel. - We can combine steering behaviours normally. - For example combined seek and face. - Or we can weight the steering behaviours. - 0.8 seek. - 0.1 align. - 0.1 obstacle avoidance. --- # Comments on Steering - Steering behaviours are very simple. - They are also very fast to calculate. - They can also be very powerful. - Combining steering behaviours can lead to rich, complicated movement. - They also underpin the basis of many AI techniques. - Path finding uses a path following steering behaviour. - State machines and decision trees can determine which steering behaviour to perform. - Steering behaviours by themselves can lead to weird behaviour. - Remember some of the path finding examples. --- # Summary - As always, we have only really scratched the surface of steering behaviours. - There are numerous other behaviours out there. - Basic steering is good, but quite simple. - We normally want to combine behaviours. - Weighted. - Flocking. - Consider what behaviour you want, and just program the movement. - Do not worry about complexities.